Wykorzystanie filtru Kalmana w analizie chodu człowieka za pomocą czujników głębi
Praca inżynierska, 2024
Autor: Dawid Potwora
Promotor: Jakub Wagner
Streszczenie
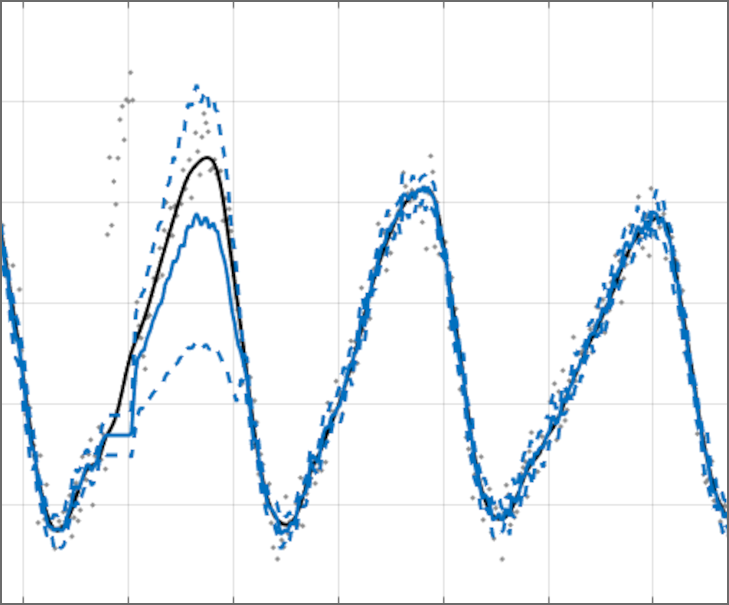
Poniższa praca inżynierska dotyczy filtracji danych pozyskanych z kamery głębi Kinect v2. W tym celu wykorzystany został filtr Kalmana, zaimplementowany w programie Matlab, na którym to zostały wykonane późniejsze testy. Obejmują one zarówno wizualną interpretację danych pozyskanych z kamery głębi, jak i porównanie do wyników idealnych z bazy internetowej, które zostały sztucznie zaszumione.
Sam filtr został dostosowany do trzech modeli ruchu, nazwanych w późniejszej części pracy: Model 1, Model 2 i Model 3. Model 1 bazuje na podstawowej wersji filtru Kalmana, zakładającej ruch jednostajny z losowymi odchyłkami. Model 2 został dostosowany do ruchu przyśpieszonego. Model 3 zaś, dzięki parametrom wyznaczonym za pomocą przekształcenia Fouriera, uwzględnia modelowanie ruchu za pomocą funkcji sinusoidalnych.
Oprócz konwencjonalnych filtrów Kalmana zostały zaimplementowane dwa inne algorytmy przetwarzania danych. Pierwszy z nich ma na celu korekcję błędów grubych występujących w danych zbieranych z kamery głębi, w szczególności w przypadkach zasłonięcia danej części ciała czy też luźnych ubrań. Drugi ma za zadanie automatycznie optymalizować parametry filtru Kalmana, tym samym poprawiając jakość filtracji oraz zapobiegając przypadkom rozregulowania filtru.