Lokalizacja stawów kolanowych i stóp człowieka na podstawie obrazów głębi
Praca inżynierska, 2025
Autor: Mateusz Kozłowski
Promotor: Jakub Wagner
Streszczenie
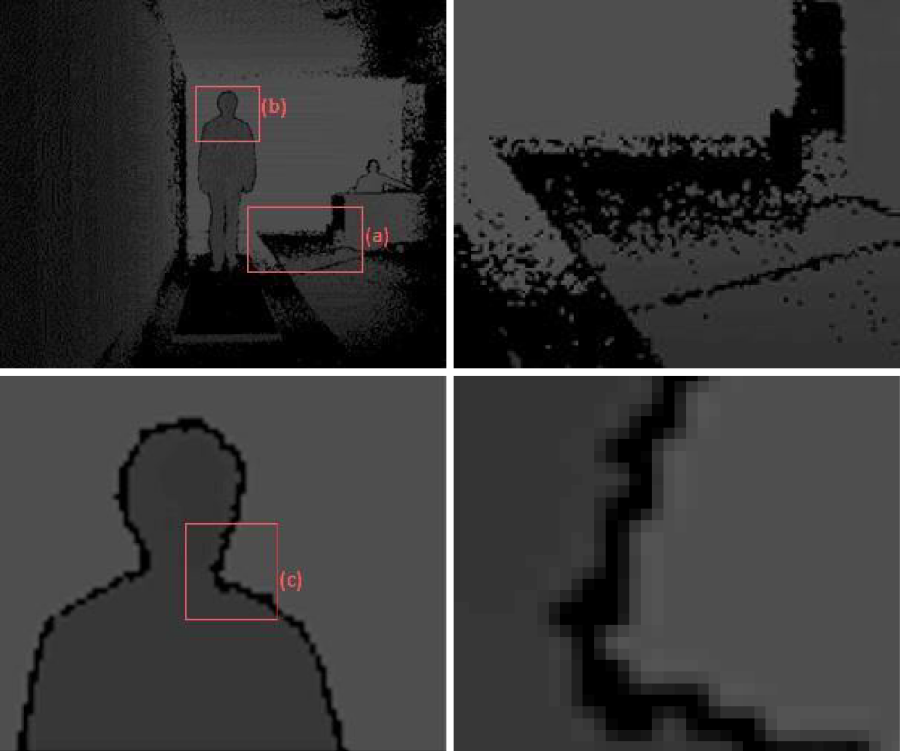
Niniejsza praca dotyczy opracowania algorytmu do lokalizacji stawów kolanowych i stóp człowieka na podstawie danych z czujnika głębi Microsoft Kinect v2. Głównym celem jest zwiększenie zasięgu oraz poprawa dokładności analizy w porównaniu z wbudowanymi rozwiązaniami Kinecta. Czujnik ten, choć powszechnie dostępny i tani w użytkowaniu, posiada ograniczenia, takie jak duża niepewność pomiarowa oraz zakłócenia na krawędziach obiektów i w tle obrazu głębi.
W ramach pracy opracowano algorytm przetwarzania obrazu głębi, który obejmuje usuwanie zakłóceń, separację sylwetki osoby badanej od tła, a następnie identyfikację kluczowych elementów ciała – stóp i kolan – przy użyciu technik segmentacji obrazu oraz analizy morfologicznej. Zastosowano filtrację sygnałów w celu minimalizacji wpływu szumów, a także transformację współrzędnych danych wyjściowych zgodnie z układem czujnika głębi.
Wszystkie operacje zostały zaimplementowane w środowisku MATLAB, z wykorzystaniem pakietu Image Processing Toolbox. Stworzono trzy skrypty: do przetwarzania danych, wizualizacji wyników oraz testowania metody. Skrypty te umożliwiają intuicyjne i wydajne przetwarzanie danych wejściowych oraz prezentację wyników w postaci animacji i wykresów.
Opracowana metoda była testowana na różnych zestawach danych, co potwierdziło jej skuteczność w wyznaczaniu położeń stawów kolanowych i stóp. Przeprowadzono porównanie wyników z danymi uzyskiwanymi z natywnego algorytmu Kinecta, uzyskując lepszą dokładność i większy zasięg analizy. Opracowane rozwiązanie może być wykorzystane w analizie czasowo-przestrzennej chodu, wspierając diagnostykę w medycynie, rehabilitacji i badaniach biomechanicznych.