Kinematic analysis of human gait using a depth sensor
Engineer's thesis, 2024
Author: Ewelina Borkowska
Supervisor: Jakub Wagner
Abstract
This study focuses on the development of a methodology for kinematic gait analysis using data acquired with the Microsoft Kinect depth sensor, processed in the MATLAB environment. The primary goal is to determine the angles in the hip, knee, and ankle joints, which is crucial in kinematic analysis of human gait. The scope of work also includes the development of an application with a graphical user interface to support gait analysis.
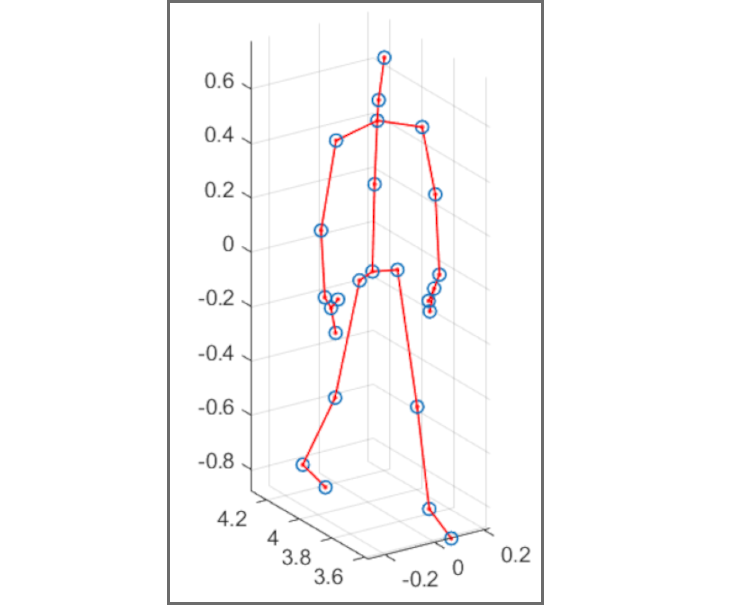
The study focuses on the development of data processing algorithms that allow the analysis of body movements, based on estimates of three-dimensional coordinates of selected points on the human body, acquired with the Microsoft Kinect depth sensor. The implemented data processing method includes data smoothing, which is used to reduce measurement errors, thereby increasing the accuracy of the results, as well as other aspects of biomechanical gait analysis such as determining the subject’s walking speed and determining foot placement moments based on the anteroposterior distance between the knees. The results of this analysis have potential applications in various fields, including rehabilitation medicine, biomechanics, and the ergonomic design of devices that assist in walking. The study includes a detailed literature review, testing the methods on real-world data, and evaluating their effectiveness. The testing phase focused on verifying the effectiveness of the algorithms under practical conditions, using real-world data representing the gait of several individuals. This allowed an assessment of the effectiveness and potential limitations of the developed methods. The study adopted an approach that combines the principles of biomechanics with the use of depth sensor technology. The developed algorithm was tested and verified in terms of its ability to accurately track and analyze human body movement. The developed method for analyzing human gait is promising in terms of its potential applications in clinical practice and in further research on biomechanics of movement.