Localization of human knee joints and feet based on depth images
Engineer's thesis, 2025
Author: Mateusz Kozłowski
Supervisor: Jakub Wagner
Abstract
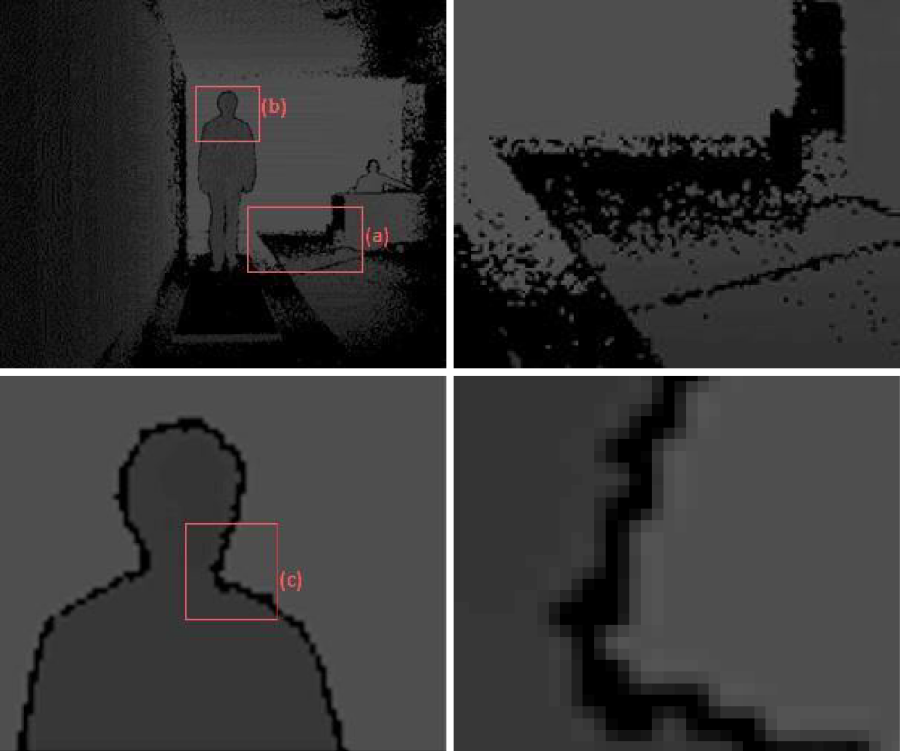
This engineering thesis focuses on developing an algorithm for human knee joints and feet based on depth data acquired from the Microsoft Kinect v2 sensor. The primary objective is to enhance the analysis range and to improve the ccuracy compared to the default solutions provided by Kinect. While the Kinect sensor is widely accessible and cheap, it has limitations, including significant measurement uncertainty and disturbances at object edges and in the background of depth images.
The proposed algorithm processes depth images by removing noise, separating the subject's silhouette from the background, and identifying key body parts – knees and feet – using image segmentation and morphological analysis techniques. Signal filtering was applied to minimize the impact of noise, and the output data coordinates were transformed according to the depth sensor's reference frame.
All operations were implemented in MATLAB using the Image Processing Toolbox. Three scripts were developed: one for data processing, another for result visualization, and a third for method testing. These scripts enable intuitive and efficient handling of input data and present the results as animations and graphs.
The method was tested on various datasets, confirming its effectiveness in determining the positions of knee joints and feet. A comparison with the native Kinect algorithm demonstrated superior accuracy and an extended range of analysis. The developed solution can be applied in spatiotemporal gait analysis, supporting diagnostics in medicine, rehabilitation, and biomechanical research.