The use of the Kalman filter in the analysis of human gait by means of depth sensors
Engineer's thesis, 2024
Author: Dawid Potwora
Supervisor: Jakub Wagner
Abstract
The following engineering thesis is devoted to the filtering of data obtained from the Kinect v2 depth camera. For this purpose, a Kalman filter was utilized, implemented in the Matlab program, where subsequent tests were conducted. These tests include both visual interpretation of data acquired from the depth camera and a comparison to ideal results from an online database that were artificially corrupted with noise.
The filter itself has been adapted to three motion models, named in the later part of the thesis as Model 1, Model 2, and Model 3. Model 1 is based on the basic version of the Kalman filter, assuming uniform motion with random deviations. Model 2 has been adapted for uniformly accelerated motion. Model 3, thanks to parameters determined using the Fourier transform, involves modelling the motion using sine functions.
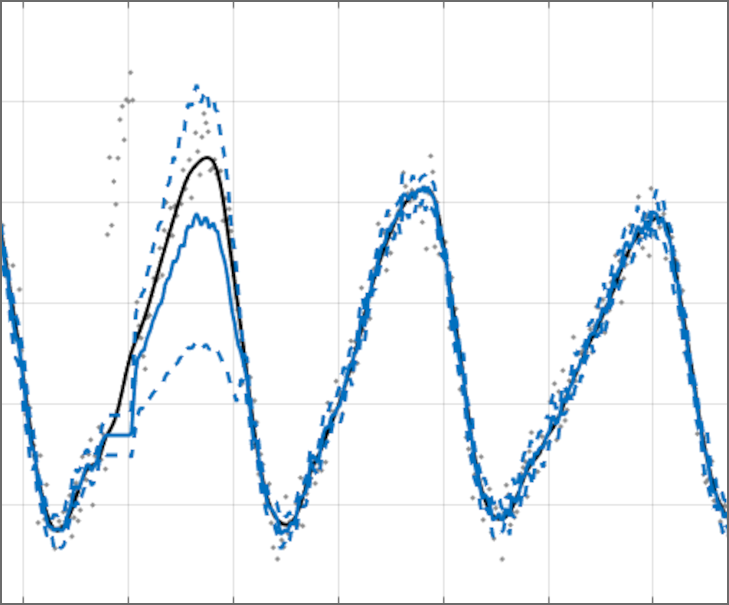
Two data-processing algorithms have been implemented for the apart from the conventional Kalman filters. The first aims to correct gross errors occurring in data collected from the depth camera, especially in cases of obscuring parts of the body or loose clothing. The second is designed to automatically optimise the parameters of the Kalman filter, thereby improving the quality of filtration and preventing instances of misadjustment of the filter.